Восприятие величины, формы и объемности предметов
Восприятие величины, формы и объемности предметов обусловлено совместной деятельностью зрительных, мышечных и осязательных ощущений.
Основой восприятия величины предметов являются размеры объективно существующих предметов, изображения которых получаются на сетчатке глаза. Особенность строения человеческого глаза такова, что изображение предмета, находящегося на далеком расстоянии, будет меньшим, чем изображение равного ему предмета, расположенного близко от нас.
Восприятие формы – сложный процесс зрительного восприятия, при котором большое значение имеют движения глаз. При этом оптические данные обрабатываются мозгом в сочетании с данными глазодвигательных мышц глаз. Последние как бы ощупывают предмет и функционируют в качестве измерительного прибора.
При восприятии плоской формы существенное значение имеет отчетливое различение очертаний предметов, его контура. При восприятии объемной формы существенную роль играет глубинное зрение.
При восприятии формы предмета существенно его взаимодействие с фоном. В зрительном восприятии фон выступает основанием для системы отсчета – цветовые и пространственные характеристики объектов оцениваются относительно фона. Фон дает информацию о ситуации восприятия, обеспечивает константность восприятия. При совпадении контуров обоих объектов могут возникнуть так называемые двойственные фигуры. Так, на рис. 37 показана двойственная фигура, которая может восприниматься или как голова, или как дерево в ветреную погоду.
В то же время четкости восприятия содействует резкая очерченность контура объекта. Известно, что с различения контура объекта и начинается процесс восприятия, лишь после этого различаются его форма и структура.
Рис. фигуры при совпадении контуров объектов |
 37. Пример восприятия двойственной
37. Пример восприятия двойственнойНо одно только зрение не может обеспечить правильного восприятия формы предметов. Это достигается при соединении зрительных ощущений с мышечно-двигательными и осязательными или представлениями, оставшимися от прошлого опыта. Так происходит непосредственное восприятие формы предмета, его рельефа путем осязания, в котором принимает участие кожный и двигательный анализаторы.
В основе восприятия объемности предметов лежит бинокулярное зрение (видение с помощью двух глаз). При этом видении получаются два изображения на сетчатке левого и правого глаза. Эти изображения не совсем одинаковы: изображение предмета на сетчатке левого глаза отражает его больше с левой стороны, тогда как на сетчатке правого глаза отражается больше правая сторона предмета. Одновременное видение предмета двумя глазами создает впечатление объемности воспринимаемого предмета.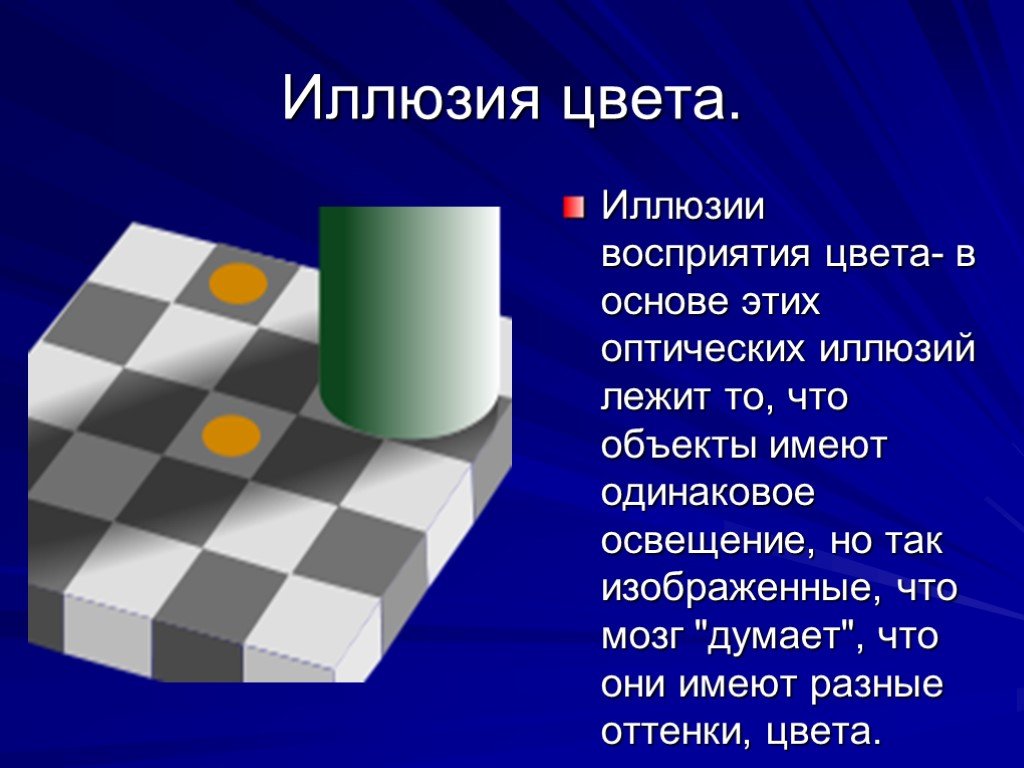
Поможем написать любую работу на аналогичную тему
Реферат
Восприятие величины, формы и объемности предметов
От 250 руб
Контрольная работа
Восприятие величины, формы и объемности предметов
От 250 руб
Курсовая работа
Восприятие величины, формы и объемности предметов
От 700 руб
Получить выполненную работу или консультацию специалиста по вашему учебному проекту
Узнать стоимостьформы, величины, глубины и удаленности предметов, направления.
 Восприятие времени и движения.
Восприятие времени и движения.
|
|||||
|
Дата добавления: 2014-11-24 | Просмотров: 1522 Восприятие пространства играет большую роль во взаимодействии человека с окружающей средой, являясь необходимым условием ориентировки в ней человека. Восприятие пространства представляет собой отражение объективно существующего пространства и включает восприятие формы, величины и взаимного расположения объектов, их рельефа, удаленности и направления, в котором они находятся. Взаимодействие человека со средой включает и само тело человека с характерной для него системой координат. Сам ощущающий человек — материальное тело, занимающее определенное место в пространстве и обладающее известными пространственными признаками (величиной, формой, тремя измерениями тела, направлениями движений в пространстве). Определение формы, величины, местоположения и перемещения предметов относительно друг друга и одновременный анализ положения собственного тела относительно окружающих предметов совершаются в процессе двигательной деятельности организма и составляют особое высшее проявление аналитико-синтетической деятельности, называемое пространственным анализом. Установлено, что в основе различных форм пространственного анализа лежит деятельность комплекса анализаторов, ни одному из которых не присуща монопольная роль в анализе пространственных факторов среды.Особую роль в пространственной ориентировке выполняет двигательный анализатор, с помощью которого устанавливается взаимодействие между различными анализаторами. К специальным механизмам пространственной ориентировки следует отнести нервные связи между обоими полушариями в анализаторной деятельности: бинокулярное зрение, бинауральный слух, бимануальное осязание, дириническое обоняние и т.д. Важную роль в отражении пространственных свойств предметов играет функциональная симметрия, которая характерна для всех парных анализаторов. Восприятие формы предметов обычно осуществляется с помощью зрительного, тактильного и кинестезического анализаторов. В восприятии формы предметов принимают участие три основные группы факторов: 1. Врожденная способность нервных клеток коры головного мозга избирательно реагировать на элементы изображений, имеющие определенную насыщенность, ориентацию, конфигурацию и длину. Такие клетки называются клетками-детекторами. Благодаря свойствам своих рецептивных полей, они выделяют в зрительном поле вполне определенные элементы, например, световые линии конкретной длины, ширины и наклона, острые углы, контрасты, изломы на контурных изображениях. 2. Законы образования фигур, форм и контуров, выделенные гештальтпсихологами и описанные выше. 3. Жизненный опыт, получаемый за счет движений руки по контуру и поверхности объектов, перемещения человека и частей его тела в пространстве. Зрительное восприятие формы предмета определяется также условиями наблюдения: величиной предмета, его расстоянием от глаз наблюдателя, освещенностью, контрастом между яркостью объекта и фона и т.п. Наиболее информативный признак, который нужно выделить при ознакомлении с формой, это контур. Именно контур служит раздельной гранью двух реальностей, т.е. фигуры и фона. Благодаря микродвижениям глаз может выделять границы объектов (контур и мелкие детали). Зрительная система должна быть способна не только выделять границу между объектом и фоном, но и научиться следовать по ней. Это осуществляется посредством движений глаза, которые как бы вторично выделяют контур и являются необходимым условием создания образа формы предмета. Аналогичный процесс мы имеем в осязательном восприятии. Чтобы определить на ощупь форму невидимого предмета, необходимо брать этот предмет, поворачивать его, прикасаться к нему с разных сторон. При этом рука ощупывает предмет легкими движениями, то и дело возвращаясь назад, как бы проверяя, правильно ли воспринята та или иная его часть. Формирующийся образ предмета складывается на основании объединения в комплекс тактильных и кинестезических ощущений. Общую закономерность восприятия различных объектов отражает так называемый закон перцепции, предполагающий дихотомию сменяющихся качественно различных уровней образа воспринимаемого объекта. Закон перцепции — закон восприятия, открытый немецким психологом Н. Ланге, суть которого заключается в следующем: процесс восприятия представляет собой быструю смену менее конкретного, более общего восприятия предмета, явления более частным, конкретным, дифференцированным. Восприятие величины предмета. Воспринимаемая величина предметов определяется величиной их изображения на сетчатке глаза и удаленностью от глаз наблюдателя. Аккомодация— это изменение кривизны хрусталика при настройке глаза на четкое восприятие близких и отдаленных объектов. Так, при взгляде на близко расположенные предметы происходит мышечное сокращение, в результате чего уменьшается степень натяжения хрусталика и его форма становится более выпуклой. С возрастом хрусталик постепенно становится менее подвижным и теряет способность к аккомодации, т.е. к изменению своей формы при взгляде на различно удаленные предметы. В результате развивается дальнозоркость, которая выражается в том, что ближайшая точка ясного видения с возрастом отодвигается все дальше и дальше. Аккомодация обычно связана с конвергенцией, т.е. сведением зрительных осей на фиксируемом объекте или в одну точку зрительного пространства. Определенное состояние аккомодации вызывает и определенную степень сведения зрительных осей, и наоборот, тому или иному сведению зрительных осей соответствует определенная степень аккомодации. Угол конвергенции непосредственно используется как индикатор расстояния, как своеобразный дальномер. Можно изменить угол конвергенции для данного расстояния с помощью призм, помещенных перед объектом. Если при этом угол конвергенции увеличивается, видимая величина объекта тоже увеличивается, а воспринимаемое до него расстояние уменьшается. Если же призмы расположены так, что угол конвергенции уменьшается, то видимый размер объекта тоже уменьшается, а расстояние до него увеличивается. Комбинация двух раздражителей — величины изображения предмета на сетчатке и напряжения глазных мышц в результате аккомодации и конвергенции — и является условно-рефлекторным сигналом размера воспринимаемого предмета. Восприятие глубины и удаленности предметов. Аккомодация и конвергенция действуют лишь в очень небольших пределах, на небольших расстояниях: аккомодация — в пределах 5-6 метров, конвергенция — до 450 метров. Между тем человек способен различать глубину воспринимаемых предметов и занимаемого ими пространства на расстоянии до 2,5 километров. Эта способность оценивать глубину, на первый взгляд, кажется врожденной. В эксперименте ребенка-ползунка помещали на настил, рядом с которым находился обрыв, где поверх пустого пространства было положено толстое стекло. Эксперимент показал, что ребенок, свободно ползающий по настилу, не покидает его и останавливается перед стеклом. При более углубленном исследовании выяснилось, что ребенок реагирует остановкой не на глубину, открывающуюся в обрыве, а на новизну ситуации, связанной с необходимостью перемещения на новую, неизвестную еще поверхность. Останавливает ребенка не глубина, а новизна, вызывающая ориентировочную реакцию и задержку движения. Аналогичный результат имел место, когда за пределами настила под стеклом помещали блестящую фольгу — ребенок также останавливался на границе двух разных поверхностей. Восприятие глубины и удаленности предметов осуществляется главным образом благодаря бинокулярному зрению. При бинокулярной фиксации дальних объектов (например, звезд на небе) зрительные линии обоих глаз параллельны. Возбуждение корреспондирующих точек сетчатки дает ощущение одного объекта в поле зрения. При каждом положении глаз корреспондирующим точкам сетчаток соответствуют строго определенные точки во внешнем пространстве. Графическое изображение точек пространства, обеспечивающих видение одного объекта при данном положении глаз, называется гороптером. Если изображение предмета падает в оба глаза на различно удаленные от центра сетчатки некорреспондирующие, или диспаратные, точки, то имеет место один из двух эффектов: возникновение двойственных изображений (если диспаратность точек достаточно велика) или впечатление большей или меньшей удаленности данного объекта по сравнению с фиксируемым (если диспаратность невелика). Этот эффект можно наблюдать с помощью стереоскопа — аппарата для раздельного предъявления двух картин левому глазу. Эти картины образуют стереопару, которая получается при раздельной съемке двумя фотокамерами, расположенными на расстоянии, равном расстоянию между глазами. Таким образом получаются диспаратные изображения, при рассматривании которых возникает рельефное изображение. Восприятие глубины может достигаться благодаря вторичным признакам, являющимся Восприятие направления. Одним из важных моментов пространственного различения является восприятие направления, в котором находятся объекты по отношению к другим объектам или наблюдателю. Направление, в котором мы видим объект, определяется местом его изображения на сетчатке глаза и положением нашего тела по отношению к окружающим предметам. При бинокулярном зрении направление видимого предмета определяется законом тождественного направления. По этому закону, раздражители, падающие на корреспондирующие точки сетчатки, видятся нами в одном и том же направлении. Это направление дается линией, соединяющей пересечение зрительных линий обоих глаз с точкой, соответствующей середине расстояния между обоими глазами. Иными словами, изображения, попадающие на корреспондирующие точки, мы видим на прямой, идущей как бы от одного “циклопического глаза”, находящегося посередине лба. Известно, что на сетчатке глаза образуется перевернутое изображение тех предметов, на которые мы смотрим. Перемещение наблюдаемого объекта вызывает перемещение сетчаточного изображения в обратном направлении. Однако мы воспринимаем предметы, и движущиеся и неподвижные, не в искаженном виде, а такими, какими их передает на сетчатку оптическая система глаз. Это происходит благодаря сочетанию зрительных ощущений с тактильными, кинестезическими и другими сигналами. Восприятие направления, в котором находятся объекты, возможно не только с помощью зрительного, но и с помощью слухового и обонятельного анализаторов. Для животных нередко звук и запах — единственные сигналы, действующие на расстоянии и предупреждающие об опасности. Восприятие направления звука осуществляется при бинокулярном слушании. Основу дифференцировки направлений звука составляет разность во времени поступления сигналов в кору головного мозга от обоих ушей. Звуки могут локализоваться не только в левом и правом направлении по горизонтали, но и по направлению вверх и вниз. Таким образом, механизм локализации звука учитывает не только слуховые сигналы, но и данные других анализаторных систем. Движение окружающих нас предметов мы способны воспринимать благодаря тому, что перемещение происходит обычно на каком-либо фоне, это позволяет сетчатке глаза последовательно воспроизводить происходящие изменения в положении движущихся тел по отношению к тем элементам, перед которыми или позади которых и перемещается предмет. Восприятие пространства основывается на восприятии величины и формы предметов с помощью синтеза зрительных, мышечных и осязательных ощущений, а также на восприятии объема и удаленности предметов, что обеспечивается бинокулярным зрением. Достаточно точно установлено, что восприятие времени меняют некоторые медикаменты, влияющие прежде всего на ритмику нашего организма. Все воздействия, ускоряющие процессы в организме, ускоряют для нас и течение времени, а физиологические депрессанты замедляют его. Существует тенденция переоценивать отрезки времени менее одной секунды и недооценивать интервалы более одной секунды. Любопытно, что более коротким по времени кажется произнесение осмысленного предложения, чем набора бессмысленных слогов, произносимых столько же времени. Основной закон восприятия времени, сформулированный Вундтом: «Всякий раз, когда мы обращаем свое внимание на течение времени, Оно кажется длиннее». Никогда минута не покажется нам столь длинной, как тогда, когда мы следим за стрелкой часов, проходящей 60 делений. Имеются большие индивидуальные различия в способности оценивать время. У одного и того же испытуемого восприятие времени чрезвычайно варьирует в зависимости от душевного и физического состояния. Наша способность судить о длительности времени позволяет образовать временное измерение – ось времени, на которой мы более или менее точно размещаем события. Текущий момент (сейчас) отмечает особую точку на этой оси, события прошлого размещаются до, а события ожидаемого будущего – после этой точки. Это общее восприятие отношений настоящего и будущего носит название «временной перспективы». |

 Функциональная асимметрия состоит в том, что одна из сторон анализатора является в определенном отношении ведущей, доминирующей. Было показано, что отношения между сторонами анализатора в смысле их доминирования динамичны и неоднозначны. Так, глаз, доминирующий по остроте зрения, может быть не ведущим по величине ноля зрения и т.п.
Функциональная асимметрия состоит в том, что одна из сторон анализатора является в определенном отношении ведущей, доминирующей. Было показано, что отношения между сторонами анализатора в смысле их доминирования динамичны и неоднозначны. Так, глаз, доминирующий по остроте зрения, может быть не ведущим по величине ноля зрения и т.п.

 Приспособление глаза к четкому видению различно удаленных предметов осуществляется с помощью двух механизмов: аккомодации и конвергенции.
Приспособление глаза к четкому видению различно удаленных предметов осуществляется с помощью двух механизмов: аккомодации и конвергенции.

 При этом изображения удаленных предметов видятся нами в одних и тех же местах пространства, независимо от того, падают ли эти изображения на сетчатку правого или левого глаза или обоих глаз. Следовательно, некоторым точкам сетчатки одного глаза соответствуют определенные точки сетчатки другого глаза. Эти симметрично расположенные точки сетчаток обоих глаз называются корреспондирующими точками.
При этом изображения удаленных предметов видятся нами в одних и тех же местах пространства, независимо от того, падают ли эти изображения на сетчатку правого или левого глаза или обоих глаз. Следовательно, некоторым точкам сетчатки одного глаза соответствуют определенные точки сетчатки другого глаза. Эти симметрично расположенные точки сетчаток обоих глаз называются корреспондирующими точками. В последнем случае появляется впечатление объемности, или стереоскопический эффект.
В последнем случае появляется впечатление объемности, или стереоскопический эффект.  Для человека характерно вертикальное положение тела по отношению к горизонтальной плоскости земли. Это положение, созданное общественно-трудовой природой человека, является исходным для определения направления, в котором человек распознает окружающие предметы. Поэтому в пространственном видении, в том числе и восприятии направления, помимо зрительных ощущений, большую роль играют не только кинестезические ощущения движений глаз или рук, но и статические ощущения, т.е.ощущения равновесия и положения тела.
Для человека характерно вертикальное положение тела по отношению к горизонтальной плоскости земли. Это положение, созданное общественно-трудовой природой человека, является исходным для определения направления, в котором человек распознает окружающие предметы. Поэтому в пространственном видении, в том числе и восприятии направления, помимо зрительных ощущений, большую роль играют не только кинестезические ощущения движений глаз или рук, но и статические ощущения, т.е.ощущения равновесия и положения тела.
 Экспериментальные данные показали, что в последнем случае для восприятия пространственного расположения звука необходимы движения головы испытуемого.
Экспериментальные данные показали, что в последнем случае для восприятия пространственного расположения звука необходимы движения головы испытуемого. Хинин и алкоголь заставляют время течь медленнее. Кофеин, по-видимому, ускоряет его, подобно лихорадке.
Хинин и алкоголь заставляют время течь медленнее. Кофеин, по-видимому, ускоряет его, подобно лихорадке. При подавленности или фрустрации время течет медленно. Время, насыщенное в прошлом переживаниями, деятельностью, вспоминается как более продолжительное, а длительный период жизни, наполненный малоинтересными событиями, вспоминается как быстро прошедший. Протяженность времени меньше 5 минут при воспоминании обычно кажется больше своей величины, а более длительные промежутки вспоминаются как уменьшенные.
При подавленности или фрустрации время течет медленно. Время, насыщенное в прошлом переживаниями, деятельностью, вспоминается как более продолжительное, а длительный период жизни, наполненный малоинтересными событиями, вспоминается как быстро прошедший. Протяженность времени меньше 5 минут при воспоминании обычно кажется больше своей величины, а более длительные промежутки вспоминаются как уменьшенные.Объемный 3D-дисплей обеспечивает истинное восприятие объектов
Система отображения, основанная на проекционном механизме цифровой обработки света, дает как физиологические, так и психологические сигналы глубины зрительной системе человека.
23 июля 2012 года
Джейсон Генг
Физический мир вокруг нас представлен в 3D, однако традиционные устройства отображения способны отображать только плоские 2D-изображения, в которых отсутствует информация о глубине (третьем измерении). Это фундаментальное ограничение сильно ограничивает способность людей воспринимать и понимать сложность объектов реального мира. Почти 50% возможностей человеческого мозга посвящены обработке визуальной информации. Плоские изображения и 2D-дисплеи не позволяют эффективно использовать возможности мозга.
Существует четыре основных физических признака глубины, которые человеческий мозг использует для получения истинного трехмерного ощущения. Первый, аккомодация, измеряет, насколько мышцы глаза заставляют глазные линзы изменять форму при фокусировке на изображении определенного трехмерного объекта в сцене. Второй, конвергенция, измеряет расстояние, которое глаза должны пересечь, чтобы одновременно видеть трехмерный объект. Третий, параллакс движения, предлагает сигналы глубины путем сравнения относительного движения различных элементов в 3D-сцене. И, наконец, бинокулярное несоответствие относится к различиям в изображениях, получаемых левым и правым глазом.
Третий, параллакс движения, предлагает сигналы глубины путем сравнения относительного движения различных элементов в 3D-сцене. И, наконец, бинокулярное несоответствие относится к различиям в изображениях, получаемых левым и правым глазом.
Традиционные 2D-дисплеи не могут предоставить зрителям эти 3D-подсказки о глубине, что часто приводит к двусмысленности и путанице при представлении многомерных данных/графики. Напротив, технологии объемного 3D-дисплея могут обеспечить все вышеупомянутые признаки глубины путем отображения объемных 3D-изображений в истинном 3D-пространстве. Каждый воксель в 3D-изображении (аналогично пикселю в 2D-изображении) физически находится в пространственном положении, где он должен находиться, и излучает свет из этого положения во всех направлениях, формируя реальное 3D-изображение в 3D-пространстве. Технологии объемного 3D-отображения обеспечивают реалистичное пространственное представление 3D-объектов и упрощают наше понимание сложных 3D-объектов реального мира и пространственных отношений между ними.
Рис. 1. Принцип многоплоскостного объемного 3D-дисплея с использованием высокоскоростного проекционного двигателя и вращающегося экрана с двойной спиралью. Свет от источника (1) отражается поляризационным светоделителем (2) к пространственному модулятору света (3), изображения которого формируются персональным компьютером (4). Проекционная оптика (5) формирует изображения на вращающемся экране с двойной спиралью (6). ПК: Персональный компьютер.
На рис. 1 показан принцип работы нашего объемного 3D-дисплея с цифровой обработкой света (DLP)/Helix. 1–4 Свет, исходящий от источника, отражается поляризационным светоделительным кубом по направлению к пространственному модулятору света (SLM), шаблоны изображений которого генерируются главным персональным компьютером (ПК). Шаблоны модулированного изображения проецируются оптикой на вращающийся экран с двойной спиралью. Мы используем набор микросхем DLP, предоставленный Texas Instruments (TI), в качестве высокоскоростного устройства SLM в нашей системе. Механизм проецирования DLP обеспечивает высокоскоростную генерацию изображений с высоким разрешением и высокой яркостью для объемных 3D-дисплеев.
Механизм проецирования DLP обеспечивает высокоскоростную генерацию изображений с высоким разрешением и высокой яркостью для объемных 3D-дисплеев.
В рамках процесса генерации изображения мы синхронизировали движение вращающегося экрана по спирали с синхронизацией проекции шаблона DLP таким образом, чтобы движущийся экран перехватывал проекции высокоскоростного 2D-изображения из DLP в различных пространственных положениях вдоль оси z. Это формирует стопку слоев пространственного изображения, которые зрители могут воспринимать как настоящие трехмерные объемные изображения. Просмотр таких изображений не требует специальных очков. 3D-изображение плавает в истинном 3D-пространстве, как и реальный объект. Уникальные особенности дизайна 3D-дисплея DLP/Helix включают встроенную параллельную архитектуру для воксельной адресации, высокую скорость и высокое пространственное разрешение, а зрителям не нужно носить специальные очки или шлем.
Рисунок 2. Плата двигателя h4D. DMD: Цифровое зеркальное устройство. DVI: цифровой визуальный интерфейс. COM: Связь.
DMD: Цифровое зеркальное устройство. DVI: цифровой визуальный интерфейс. COM: Связь.
Ключевым компонентом системы отображения 3D DLP/Helix является интерфейсная плата между хост-компьютером и микросхемой DLP. Мы спроектировали и построили высокоскоростной механизм проецирования изображений DLP (названный h4D): см. рис. 2. Он способен напрямую соединять порт цифрового визуального интерфейса на хост-компьютере с чипом DLP, обеспечивая возможность динамического отображения трехмерного изображения и упрощенная конфигурация.
Рис. 3. Фотография образца 3D-изображения, отображаемого в системе цифровой обработки света/Helix.
Прототип системы может отображать объемные 3D-изображения с разрешением более 150 миллионов вокселей. На рис. 3 показана фотография образца 3D-изображения, отображаемого в системе DLP/Helix. К сожалению, поскольку фото 2D, настоящий объемный 3D-эффект теряется в 2D-печати на бумаге. Система также может отображать динамические последовательности 3D-изображений, такие как 3D-видео. 3D-изображения, отображаемые на нашем объемном 3D-мониторе, имеют функцию сквозной прозрачности, которая позволяет зрителям видеть как передний план, так и фоновые структуры, что повышает эффективность понимания пространственных отношений в 3D.
3D-изображения, отображаемые на нашем объемном 3D-мониторе, имеют функцию сквозной прозрачности, которая позволяет зрителям видеть как передний план, так и фоновые структуры, что повышает эффективность понимания пространственных отношений в 3D.
В заключение мы спроектировали и создали прототип объемного 3D-дисплея на основе проекционного движка DLP с разрешением изображения более 150 миллионов вокселей. Объемное 3D-отображение принципиально отличается от традиционной техники визуализации 3D-рендеринга, когда объект отображается на плоском 2D-экране с 3D-рендерингом для восприятия глубины. Он также отличается от 3D-стереовидео или дисплея с креплением на голову, где 3D-восприятие создается с помощью пары поляризованных или переключаемых очков или экранов дисплея. Устройство объемного 3D-дисплея проецирует 3D-изображения непосредственно в настоящий трехмерный объем в пространстве, который можно просматривать невооруженным глазом без необходимости использования каких-либо специальных 3D-очков. Зрители могут ходить по 3D-изображению, смотреть на него под разными углами и получать реалистичное ощущение глубины, как если бы они смотрели на реальный физический объект. Такой 3D-дисплей предоставляет зрителям как физиологические, так и психологические подсказки о глубине для правдивого восприятия объектов в 3D-пространстве.
Зрители могут ходить по 3D-изображению, смотреть на него под разными углами и получать реалистичное ощущение глубины, как если бы они смотрели на реальный физический объект. Такой 3D-дисплей предоставляет зрителям как физиологические, так и психологические подсказки о глубине для правдивого восприятия объектов в 3D-пространстве.
Текущий прототип системы отображает монохромные 3D-изображения. В дальнейшем мы разработаем полноцветную версию системы отображения с достаточной частотой обновления 3D-изображения. Мы также будем работать с потенциальными пользователями над разработкой эффективных методов трехмерного пользовательского интерфейса для системы.
Джейсон Генг
Общество интеллектуальных транспортных систем (ITS) IEEERockville, MD
Джейсон Генг имеет 20-летний опыт разработки технологий трехмерной визуализации. Опубликовал более 100 статей и одну книгу. Он изобретатель, имеющий 23 выданных патента. Он получил престижные национальные награды, в том числе премию Тиббетса, и был включен в список лучших предпринимателей Inc. 500. В настоящее время он является вице-президентом IEEE ITS Society.
500. В настоящее время он является вице-президентом IEEE ITS Society.
Ссылки:
1. З. Дж. Генг, Способ и устройство для трехмерного отображения с высоким разрешением, патент США 6,064,423. usa.gov/LLcjev По состоянию на 9 июля 2012 г.
2. Z. J. Geng, Объемный 3D-дисплей для планирования лучевой терапии, IEEE J. Display Technol. 4(4), с. 437-450, 2008.
3. J. Geng, Трехмерное изображение поверхности структурированного света: Учебное пособие, Adv. Опц. Фотон. 3, с. 128-160, 2011.
4. Z. J. Geng, Метод и устройство для интерактивного объемного 3D-дисплея, патент США 7,09.8872. usa.gov/LL4uB0 По состоянию на 9 июля 2012 г.
[PDF] Распознавание трехмерных объектов на основе классов, представленных объемными примитивами
- DOI:10.1016/S0262-8856(97)00008-5
- Идентификатор корпуса: 1 4057153
@inproceedings{Borges1997ClassbasedRO,
title={Распознавание трехмерных объектов, представленных объемными примитивами, на основе классов},
автор = {D {\ 'i} био Леандро Борхес и Роберт Б. Фишер},
booktitle={Вычисление изображения и зрения},
год = {1997}
}
Фишер},
booktitle={Вычисление изображения и зрения},
год = {1997}
}  Фишер},
booktitle={Вычисление изображения и зрения},
год = {1997}
}
Фишер},
booktitle={Вычисление изображения и зрения},
год = {1997}
} - Д. Борхес, Роберт Б. Фишер
- Опубликовано в журнале Image and Vision Computing 1 августа 1997 г.
- Информатика
Просмотр через Publisher
bmva.orgСистема классификации трехмерных объектов на основе объемных частей
900 72 Вэйвэй Син, Вэйбин Лю , Б. ЮаньИнформатика
Международная конференция IEEE по системам, человеку и…
Классификация трехмерных объектов на основе объемных частей
- Weiwei Xing, Weibin Liu, B.
- 2006
 Yuan
YuanИнформатика
5-я Международная конференция IEEE по когнитивным…
Классификация 3D-объектов на основе объемных частей
- Weiwei Xing, Weibin Liu, B. Yuan
- 2008
Информатика
Int. Дж. Когн. информатики нац. Интел.
Сочетание формы и цвета.
 Восходящий подход к оценке сходства объектов
Восходящий подход к оценке сходства объектов- Алессио Паскуччи
- 2011
Информатика
Распознавание 3D-объектов: представление и сопоставление
- Анил К. Джейн, К. Дораи
- 2000
Информатика
Стат. вычисл.
Восприятие и захват частей объекта при активном исследовании роботов
- Дж. Алеотти, Дарио Лоди Риццини, С. Казелли
- 2014
Информатика
Дж. Интелл. Роботизированная система

Восприятие и схватывание частей объекта при исследовании активного робота
- Дж. Алеотти, Дарио Лоди Риццини, С. Казелли
- 2014
Информатика
Журнал интеллектуальных и роботизированных систем
Надежное и точное восстановление Superquadric: вероятностный подход
- Weixiao Liu, Yuwei Wu, Sipu Ruan, G. Chirikjian
- 2022 900 66
Информатика
Конференция IEEE/CVF по компьютерному зрению и…

Абстракция общей модели из примеров
- Ю. Кесельман, Свен Дж. Дикинсон
- 2005
Информатика
IEEE Transactions on Pattern Analysis and Machine…
Моделирование и интерпретация архитектуры с нескольких изображений
- A. Dick, P. Torr, R. Cipolla
- 2004
Информационная наука
Международный журнал компьютерного видения

Представление, распознавание и определение местоположения трехмерных объектов
- О. Фожерас, М. Хеберт
- 1986
Информатика
BONSAI: распознавание 3D-объектов с использованием ограниченного поиска
- П. Флинн, Анил К. Джейн
- 1990
Информатика
IEEE Trans. Анальный узор. Мах. Интел.
Распознавание объектов компьютером – роль геометрических ограничений
- В.
- 1990
 Гримсон
ГримсонИнформатика
Распознавание и локализация на основе моделей по разреженным диапазонам или тактильным данным
- В. Гримсон, Томас Лосано-Перес
- 1984
Математика
В этом документе обсуждается, как локальные измерения трехмерных положений и нормалей к поверхности (зарегистрированные набором тактильных датчиков или трехмерных датчиков расстояния) могут использоваться для идентификации…
Сегментация трехмерных сочлененных объектов путем динамического группирования разрывов
- Д. Борхес, Роберт Б. Фишер
- 1993
Информатика
BMVC

Распознавание по компонентам: теория понимания человеческого образа.
- И. Бидерман
- 1987
Информатика
Психологический обзор
Решения с закрытыми формами для физического моделирования и распознавания форм
- S. Sclaroff, A. Pentland
- 1991
Физика
Труды. Конференция IEEE Computer Society, посвященная…
Автоматический синтез стратегий точного движения для роботов
- Томас Лозано-Перес, М.
